
My Day With NUMA - Part 2

(Early Start)
The next morning we woke at 5:30 and headed down to the boat. After unpacking gear and loading it on board we cast off and headed into the narrow channel and out into lake Michigan. The sun was breaking as we left the coastline far behind. It was a beautiful morning and the lake was almost flat calm.

(Heading Out)

(Dawn Breaks)
We had almost 20 miles to go to the search grid, so I sat back, looked at the diminishing shore and just let the world slide past. Lake Michigan can quickly become a very harsh mistress, but at that moment she was like a mill pond.
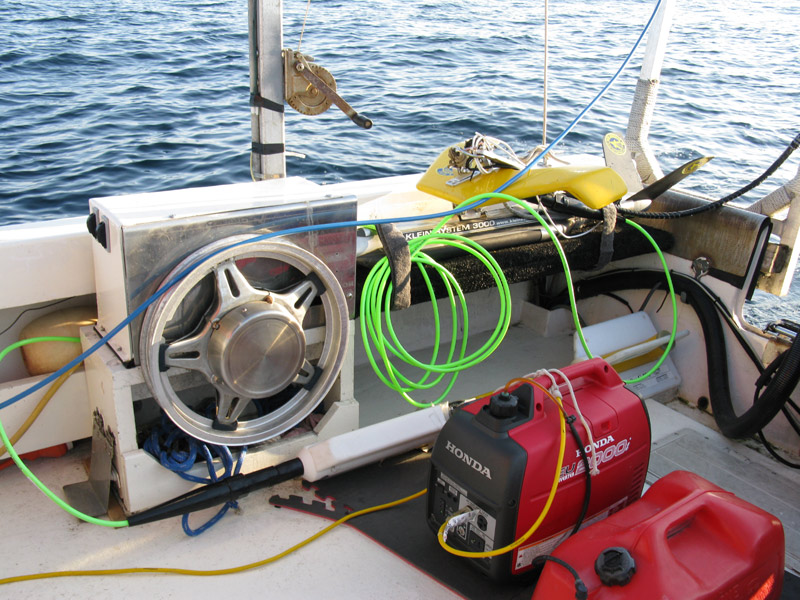
(Side-Scan Sonar and Magnetometer)
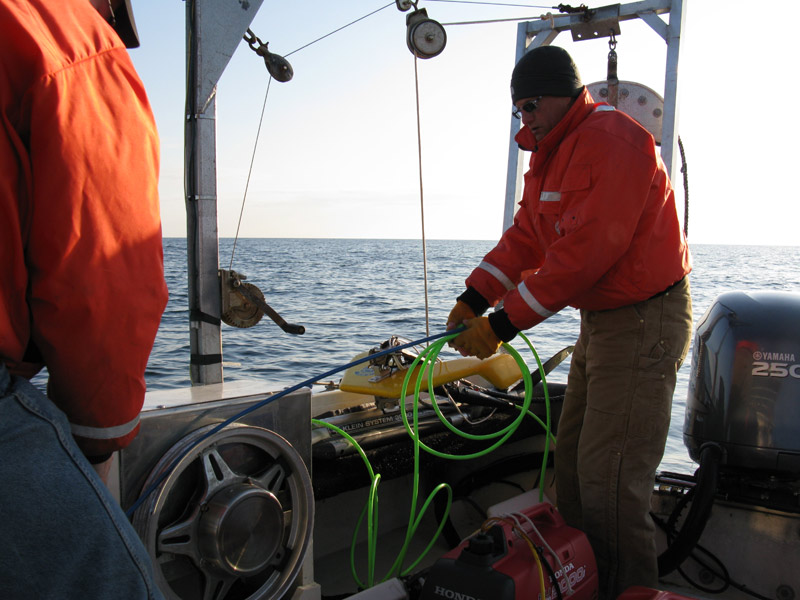
(Jim Preparing to Deploy the 'Fish')
With a GPS confirming our location, it was time to hook up the magnetometer and side-scan sonar. Both of these "fish" fly over the ocean floor picking up magnetic anomalies and painting a sonar picture of the seabed. The height off the bottom is controlled purely by the boat's speed.

(Scanning in Progress)
Interesting comment made by Ralph and echoed by David was that if I fell in, I'd better keep floating until they came back for me, because the boat wouldn't stop or else the instruments would become very expensive anchors. The boat kept moving as the guys launched the fish and played out the cables. As soon as the 200 meters of cable was out, Steve piloted the boat to the start of the grid pattern and once set up, switched on the autopilot. The autopilot ties into the GPS and a program called Hypack which controls the autopilot and also establishes the survey lanes. It records the boat track, steers the boat on the proper line and records the positions, targets and mag data for processing later.

(Steve at the Wheel)
And so we began to "mow the lawn" as Clive Cussler would say. It consisted of scanning strips of seabed approximately 500 feet wide and two miles long. The speed of the boat which was between 3 and 4 knots kept the fish at a height of approximately 70 feet above the bottom. The mag actually sat at about 7 feet below the sonar. The depth of the lake at the search grid was around 250 feet and the bottom was pretty much flat over the whole area.

(Reviewing the Data stream)
During the survey we talked about the life of a shipwreck hunter. Ralph summed it up quite succinctly; "all through life we are driven to succeed. Pass exams, do well at school, strive for a better job and in general, try to win at whatever we do. Shipwreck hunting is all about failure. Around 95% of the time we never find what we are looking for. But for the 5% of the time when we do find it, it makes up for the other 95% of failure."
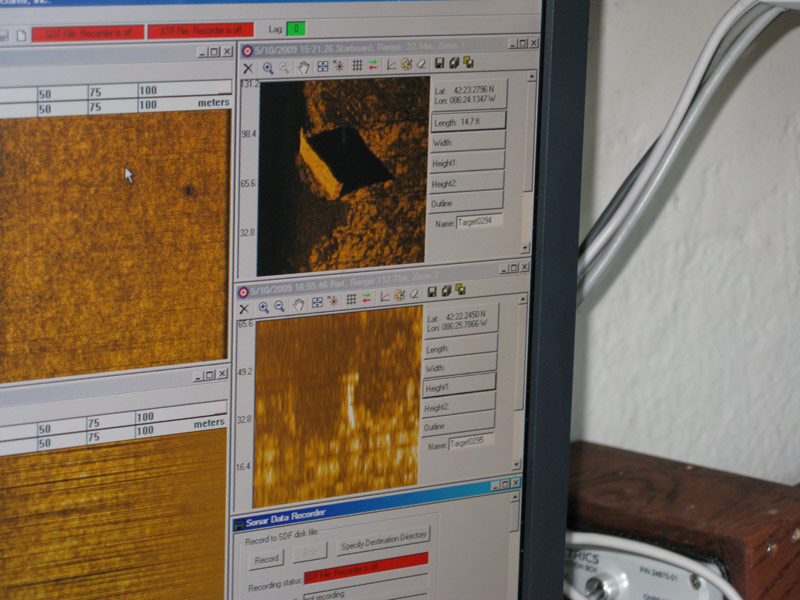
(Sidescan Image of a Sunken Hull)
One of the things we did find this trip was what looked to be a sunken hull. It is amazing how well objects show up on the side-scan sonar. First seen, though, is the hit from the magnetometer, then the echo picture starts to get built up. One of the things that amazed me was the shadow cast by the sonar. Take a look at the image above and you will see what I mean. The hull is clearly recognisable and lying partially on its side. David said that there were a number of possibilities. It was most likely an old barge which could have been deliberately sunk out in open water. Old and past its useful life, it was an easy way to dispose of it. The other possibility was that it may have been under tow and got caught in a storm and started taking on water. The only thing the crew could do would be to cast it off from the main ship and let it sink. As this was a wreck of no historical significance, Ralph didn't go back and scan it from the other side. Something he would do with a legitimate target. The final page can be accessed here .
© Dr. Peter McClean Millar - June 2009